












Learning the proper meanings and uses of navigational terms will put us all on the same page, and just might teach us some history, too (published July 2014)
Good navigation calls for clear communications. We would like to think, then, that the terms we use have precise meanings. Most do, but there are common exceptions that we should know about. This is especially important when learning navigation. In the following, we’ll review a few important terms that require special attention, either because their meaning changes with context or the definition is subtler than might be guessed. Significance is hard to rate, so we default to alphabetical order.
Allision: When two vessels underway run into each other it is called a collision. When a vessel runs into a dock (assumed above the water) then that is an allision. Allision is damage causing impact between a vessel underway and something not moving, such as an anchored vessel. This would seem just Admiralty Court jargon—there is, for example, an official “Oregon Rule” that presumes the fault lies with the moving vessel—but there are more subtle implications to this concept that I have always considered fundamental to basic navigation.
The word allision is not in the Navigation Rules. In fact, the only reference in the rules at all that refers to collisions with anything other than another vessel is in Rule 6 (b) ii, on the things we must take into account when choosing a safe speed when using radar: “the possibility that small vessels, ice and other floating objects may not be detected by radar at an adequate range.” Though never stated specifically, clearly the authors of the rules intended this document to be the guide to not running into anything. And it remains true. If you know and obey the rules, you will avoid not just collisions, but also allisions, which can be even more embarrassing.
Aspect: This describes the heading of another vessel from your perspective. It is a crucial concept in collision avoidance, especially at night as it directly reflects what lights you should see. It is defined as the relative bearing (R) of your vessel as seen from the other vessel. It is measured from 0 to 180 degrees and labeled red when we are on the port side of the vessel or green when we are on the starboard side. Thus, a vessel with aspect red 270 means you are looking at its port side. Green 45 means you are looking broad onto its starboard bow. (I did promise tricky—045R is the definition of broad on the starboard bow.)
Course Made Good (CMG): This is our average course over a specific distance or time period relative to the fixed earth. It is the direction from an earlier position to a later position, regardless of the track between these two positions. It can be something we have already done, such as our track of past positions shown on a chartplotter, or it can be something we plan in the future by anticipating the course we will achieve in the presence of current or leeway. It should not be confused with COG.
Course Over Ground (COG): This term is known to everyone who uses GPS. It originated as one of the first important derived values we learned from LORAN units. It has, however, been generalized in modern times to a point where it risks distracting from effective communication. It is best thought of as the instantaneous value of our CMG relative to the fixed earth that we read from GPS. Past or future courses are best described as CMG, not COG. The predictor line on our vessel icon in echarting, points in the direction of our COG. The trail of dots behind the icon shows our CMG. When we solve a vector problem to account for current we are finding or using our CMG, not COG.
The same distinction should be made between speed over ground (SOG) and speed made good (SMG).
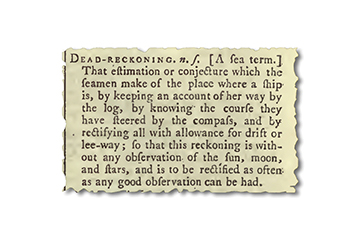
 Dead Reckoning (DR): This most fundamental of all navigation terms has two different definitions in modern times, both of which refer to a position determined for your vessel without the aid of any piloting data. (1) Position by log and compass alone and (2) your best estimate of your position taking into account everything you know about your boat, the wind and the waters you sail. The former is found by plotting distance run on each logged course, with no further corrections; the latter accounts for current, leeway, helm bias and sea state.
Dead Reckoning (DR): This most fundamental of all navigation terms has two different definitions in modern times, both of which refer to a position determined for your vessel without the aid of any piloting data. (1) Position by log and compass alone and (2) your best estimate of your position taking into account everything you know about your boat, the wind and the waters you sail. The former is found by plotting distance run on each logged course, with no further corrections; the latter accounts for current, leeway, helm bias and sea state.
This distinction is not crucial. A practical implementation is to plot the DR position by definition (1) and then apply all corrections you know about. The distinction lies only in what you call this final position, the estimated position or the DR position. We prefer the latter definition (DR is everything) as there is no real need for a second named position, and it is difficult to coordinate the plotting in a logical manner—correction for current and correction for leeway are plotted differently.
From a historical point of view, the estimated position concept is just an artifact of WWII navigation technology. Since its inception in the late 1500s, DR always meant your best estimate of your position taking everything into account. That did not change until the late 1930s with the invention of DR machines that could compute a position based on compass and log alone. The Navy then redefined DR position to be from log and compass only, which in turn forced the introduction of the estimated position concept, because that is indeed what we need for navigation.
Declination: To a land navigator, declination is the difference between magnetic north and true north. To a marine navigator this difference is called variation. In marine work, we reserve declination to mean the latitude on earth directly below a star or other celestial body. We further distinguish declination from latitude by placing the label N or S in front of declinations and after latitudes.
Drift: Used alone, this means the speed of the current, which can be measured in knots or nautical miles per day. Wind drift is sometimes used to refer to the wind-driven current, but in other contexts, wind drift is used to describe leeway speed and sometimes used as a vector to include speed and direction. Spindrift, on the other hand, is the foam blown off the tops of waves. Its first appearance is a good Beaufort Scale benchmark for about 30 knots of wind.
Estimated Position (EP): If one chooses to define a DR position as that found from compass and log alone, then anything you do to that position to improve it changes it to what is then called an estimated position. This is common training, though it does deviate from the historical meaning of DR and may add some ambiguity to the plotting. On the other hand, if DR is defined as including all you know about your navigation in the first place (short of piloting), then a DR position and an estimated position are the same.
The term estimated position requires more care when it is expanded to include piloting data, such as a single line of position (LOP) or a depth contour. If you have a single measured LOP, then in its broadest sense, one can define EP as your best estimate of your position taking everything into account, including this one LOP. This is indisputably a sound definition, and indeed the proper guide to position evaluation underway.
The required care comes into play whenever a specific prescription is given on how to do this. This type of EP, for example, is frequently defined as the point on the single LOP that is nearest to the “DR position” at the corresponding time—which immediately drives us back to the terminology. This use of “DR position” cannot mean DR by log and compass alone, because known corrections can take you away from the nearest point on the LOP. Thus, this prescription must be worded: the estimated position is the point on the LOP nearest to the estimated position without the LOP.
Even then we must be careful. When you measure an LOP by any means (compass bearing to a lighthouse or sextant sight of the sun) and this LOP does not cross through your corresponding DR position, you know only two things: one, you are on the LOP somewhere, and two, your DR is wrong. We can project that point onto the LOP and call it the estimated position—as you must do on any navigation exam!—but underway, we should remember this is largely wishful thinking. If the single LOP crosses right through the DR position, then you can add to your knowledge that the DR might be right.
Log: This term has several meanings, all related. Verb: Make an entry into the logbook (“I logged our mark rounding.”). Verb: Travel a distance (“We logged 130 miles today.”). Noun: Another name for logbook. Noun. Device for measuring distance traveled through the water (knotmeter log, taffrail log, chip log, etc).
Range: This is an important term in navigation with several distinct meanings. It can be used to refer to a specific distance between two points on a chart (“range and bearing from A to B”), and can also be used as distance from vessel to a radar target (range rings, etc). But it is also used to mean the maximum effective distance a light shows, or a radio or radar beam reaches (nominal range, luminous range, VHF range, etc). Likewise, we refer to the maximum range we can achieve under power without refueling. And of course there can be a mountain range along the coast. Thus there is a whole range of extents using this term.
Extend a given extent on a chart and you get what the British call a transit, namely the line on a chart between two landmarks or aids, which in U.S. parlance is called a range. A navigational range is between two aids put in place for that purpose; a natural range is any two objects you choose for navigation, charted or not. All navigational ranges show the nearest mark or light lower than the farther one, and a similar convention on ship’s masthead lights (forward lower than aft) has led to the nickname “range lights” for the two white masthead lights on a ship that tell us which way it is headed. By watching the space between them we can tell if and how it is turning.
Less often used is the verb to range along a coast, meaning to travel at a fixed distance off.
Sea mile: A nautical mile is defined as 1,852 meters, exactly. A sea mile is a distance of one minute of latitude. We tend to use these interchangeably, which is rarely an issue—unless you are hiding treasures by GPS coordinates in both Alaska and the Galapagos, where the latter has a sea mile that is 50 feet shorter.
Set: Set is the true direction a current flows toward, but it is also used as a verb (to be set by the current), and is also used to refer to the magnitude of the offset. “The set of the current is 200 T, which is causing me to be set off course. The GPS shows my set is 30º to port.”
Tide: Vertical motion of the water is the tide; horizontal motion of the water is the current. We are better off to not ask what the tide is doing when what we want to know is what the current is doing.
True Wind: Every meteorologist in the world, and I would hope every navigator in the world, agrees on the definition of true wind. It is the wind speed and direction relative to the fixed earth. For some aspects of sailing performance analysis, however, it can be useful to know what the wind is relative to the water, which in turn can be moving. Periodically we see this later wind referred to as “true wind,” and that should be avoided. We should not even say “true wind relative to the water,” which only muddies the matter. Ben Ellison of panbo.com has suggested calling the latter the “water wind,” which seems a good solution. Google the phrase “true wind versus water wind” to find extended discussion of this terminology.
Velocity Made Good (VMG): This is a derived term that actually predates LORAN. It began as a sailing performance term, which means your speed projected onto the direction of the true wind, either upwind or downwind. It takes a simple processor chip to compute; no position data are needed. It is still used that way, and in a sense this is the preferred meaning of the term. But with the advent of LORAN and later GPS, this term began to be used as the projection of your SOG onto the direction of your desired course. (Recall speed is just a number, but velocity is a vector, meaning a number and a direction.) Thus we get some integrated instrument systems reporting both VMG Wind and VMG Waypoint, which is tidy enough, we just need to be careful when discussing VMG on the boat. Our main concern arises when we have instruments reporting just VMG. Then we have to look up what it means.
Waypoint Closing Velocity (WCV): This is the NMEA term for VMG to a waypoint. It would be nice if manufacturers converged on common terminology, but they do not; we do not see this one used very often, maybe because it’s harder to say.
David Burch is the director of Starpath School of Navigation, which offers online courses in marine navigation and weather at www.starpath.com. He has written eight books on navigation and received the Institute of Navigation’s Superior Achievement Award for outstanding performance as a practicing navigator.